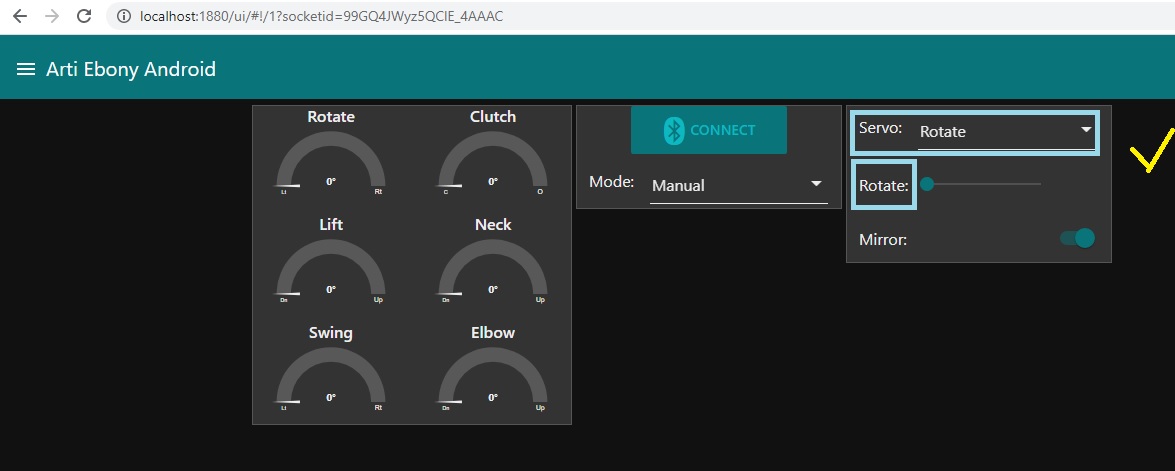
I used a single slider to control six gauges. Based on the servo (gauge) selected, the label and value of slider change. This works perfectly throughout except for a minor issue ie when I change the servo (gauge) and do not change the slider (happens only initially ie when the slider value is 0 ), the slider label does not change to next selection. Enclosing the flow which is still under dev (sorry for size as this is for the mobile screen). Kindly try selecting Manual mode.
I have just started using Node-Red, so a basic conceptual omission may be expected and highlighted.
Thanks and regards.
[{"id":"d23d43db.8dc31","type":"tab","label":"Android ui","disabled":false,"info":""},{"id":"264c0d12.7c6782","type":"inject","z":"d23d43db.8dc31","name":"","topic":"","payload":"","payloadType":"str","repeat":"","crontab":"","once":true,"onceDelay":0.1,"x":370,"y":80,"wires":[["a0929dd8.2788f"]]},{"id":"976d3c9d.24d85","type":"ui_gauge","z":"d23d43db.8dc31","name":"","group":"2ba382f5.480bce","order":5,"width":3,"height":2,"gtype":"gage","title":"Swing","label":"","format":"{{value | number}}°","min":"0","max":"180","colors":["#ca3838","#00b500","#ca3838"],"seg1":"30","seg2":"150","x":370,"y":360,"wires":[]},{"id":"68577bb3.83cd94","type":"ui_gauge","z":"d23d43db.8dc31","name":"","group":"2ba382f5.480bce","order":1,"width":3,"height":2,"gtype":"gage","title":"Rotate","label":"","format":"{{value|number}}°","min":"0","max":"180","colors":["#ca3838","#00b500","#ca3838"],"seg1":"30","seg2":"150","x":370,"y":280,"wires":[]},{"id":"18dd4dd0.b60d72","type":"ui_gauge","z":"d23d43db.8dc31","name":"","group":"2ba382f5.480bce","order":3,"width":3,"height":2,"gtype":"gage","title":"Lift","label":"","format":"{{value | number}}°","min":"0","max":"180","colors":["#ca3838","#00b500","#ca3838"],"seg1":"30","seg2":"150","x":370,"y":320,"wires":[]},{"id":"872acfef.ba58d","type":"ui_gauge","z":"d23d43db.8dc31","name":"","group":"2ba382f5.480bce","order":4,"width":3,"height":2,"gtype":"gage","title":"Neck","label":"","format":"{{value | number}}°","min":"0","max":"180","colors":["#ca3838","#00b500","#ca3838"],"seg1":"30","seg2":"150","x":370,"y":480,"wires":[]},{"id":"93d49e18.b2d32","type":"ui_gauge","z":"d23d43db.8dc31","name":"","group":"2ba382f5.480bce","order":2,"width":3,"height":2,"gtype":"gage","title":"Clutch","label":"","format":"{{value | number}}°","min":"0","max":"180","colors":["#ca3838","#00b500","#ca3838"],"seg1":"30","seg2":"150","x":370,"y":440,"wires":[]},{"id":"a134316b.f3a15","type":"ui_gauge","z":"d23d43db.8dc31","name":"","group":"2ba382f5.480bce","order":6,"width":3,"height":2,"gtype":"gage","title":"Elbow","label":"","format":"{{value | number}}°","min":"0","max":"180","colors":["#ca3838","#00b500","#ca3838"],"seg1":"30","seg2":"150","x":370,"y":520,"wires":[]},{"id":"dbe1c3d2.270a3","type":"ui_dropdown","z":"d23d43db.8dc31","name":"","label":"Mode: ","tooltip":"","place":"Select mode","group":"460ae6cb.692b28","order":4,"width":5,"height":1,"passthru":true,"options":[{"label":"Manual","value":"Manual Mode Activated","type":"str"},{"label":"Sensor Slaved","value":"Sensor Slaved Mode Activated","type":"str"},{"label":"Colour Picker","value":"In Color Picker Mode","type":"str"}],"payload":"","topic":"","x":630,"y":320,"wires":[["64af4a48.b94104","504e39e3.8d8e88"]]},{"id":"9b4051c3.8ffbf","type":"ui_button","z":"d23d43db.8dc31","name":"BL Connect","group":"460ae6cb.692b28","order":2,"width":3,"height":1,"passthru":false,"label":"<i class=\"fa fa-bluetooth fa-2x\"></i> Connect","tooltip":"","color":"#0eb8c0","bgcolor":"","icon":"","payload":"start","payloadType":"str","topic":"","x":590,"y":380,"wires":[[]]},{"id":"64af4a48.b94104","type":"ui_toast","z":"d23d43db.8dc31","position":"top right","displayTime":"3","highlight":"","sendall":true,"outputs":0,"ok":"OK","cancel":"","raw":false,"topic":"","name":"","x":670,"y":200,"wires":[]},{"id":"d893724f.1f98e","type":"ui_switch","z":"d23d43db.8dc31","name":"","label":"Mirror:","tooltip":"","group":"8feee98.7f9b318","order":4,"width":5,"height":1,"passthru":true,"decouple":"false","topic":"","style":"","onvalue":"true","onvalueType":"bool","onicon":"","oncolor":"","offvalue":"false","offvalueType":"bool","officon":"","offcolor":"","x":110,"y":500,"wires":[["fb33b913.178188"]]},{"id":"53dd2de0.6ebab4","type":"ui_dropdown","z":"d23d43db.8dc31","name":"","label":"Color","tooltip":"","place":"Select Color","group":"51e27c79.447a84","order":1,"width":5,"height":1,"passthru":false,"options":[{"label":"Red","value":"red","type":"str"},{"label":"Green","value":"green","type":"str"},{"label":"Blue","value":"blue","type":"str"}],"payload":"","topic":"","x":570,"y":500,"wires":[[]]},{"id":"f2fdaaf3.7463f8","type":"ui_ui_control","z":"d23d43db.8dc31","name":"","events":"all","x":640,"y":120,"wires":[[]]},{"id":"504e39e3.8d8e88","type":"change","z":"d23d43db.8dc31","name":"","rules":[{"t":"change","p":"payload","pt":"msg","from":"Sensor Slaved Mode Activated","fromt":"str","to":"{\"group\":{\"hide\":[\"Arti_Ebony_Android_Slider\",\"Arti_Ebony_Android_Color\",\"Arti_Ebony_Android_startup\"],\"show\":[\"Arti_Ebony_Android_Servos\",\"Arti_Ebony_Android_Main_Controls\"]}}","tot":"json"},{"t":"change","p":"payload","pt":"msg","from":"Manual Mode Activated","fromt":"str","to":"{\"group\":{\"hide\":[\"Arti_Ebony_Android_startup\",\"Arti_Ebony_Android_Color\"],\"show\":[\"Arti_Ebony_Android_Main_Controls\",\"Arti_Ebony_Android_Servos\",\"Arti_Ebony_Android_Slider\"]}}","tot":"json"},{"t":"change","p":"payload","pt":"msg","from":"In Color Picker Mode","fromt":"str","to":"{\"group\":{\"hide\":[\"Arti_Ebony_Android_startup\",\"Arti_Ebony_Android_Slider\"],\"show\":[\"Arti_Ebony_Android_Main_Controls\",\"Arti_Ebony_Android_Servos\",\"Arti_Ebony_Android_Color\"]}}","tot":"json"}],"action":"","property":"","from":"","to":"","reg":false,"x":660,"y":160,"wires":[["f2fdaaf3.7463f8"]]},{"id":"7acd57d2.038a98","type":"ui_slider","z":"d23d43db.8dc31","name":"slider","label":"{{msg.label}}","tooltip":"","group":"8feee98.7f9b318","order":2,"width":4,"height":1,"passthru":true,"outs":"all","topic":"","min":0,"max":"180","step":1,"x":90,"y":200,"wires":[["4d76b58d.ed6f2c"]]},{"id":"d30cd8c3.f04608","type":"inject","z":"d23d43db.8dc31","name":"Init","topic":"","payload":"","payloadType":"str","repeat":"","crontab":"","once":true,"onceDelay":"0.2","x":630,"y":40,"wires":[["cbabd0a8.0e0fc","40f8feb6.adda","dbe1c3d2.270a3"]]},{"id":"9f956354.d280e","type":"ui_dropdown","z":"d23d43db.8dc31","name":"","label":"Servo:","tooltip":"","place":"Select option","group":"8feee98.7f9b318","order":1,"width":5,"height":1,"passthru":true,"options":[{"label":"Rotate","value":"Rotate:","type":"str"},{"label":"Lift","value":"Lift:","type":"str"},{"label":"Swing","value":"Swing:","type":"str"},{"label":"Clutch","value":"Clutch:","type":"str"},{"label":"Neck","value":"Neck:","type":"str"},{"label":"Elbow","value":"Elbow:","type":"str"}],"payload":"","topic":"","x":90,"y":100,"wires":[["e3bde05b.6198a"]]},{"id":"e3bde05b.6198a","type":"function","z":"d23d43db.8dc31","name":"Servo Label","func":"msg.label=msg.payload;\nglobal.set(\"servo\",msg.payload);\nswitch(global.get(\"servo\")){\n case \"Rotate:\":\n msg.payload=global.get(\"sRotate\")\n break;\n case \"Lift:\":\n msg.payload=global.get(\"sLift\")\n break;\n case \"Swing:\":\n msg.payload=global.get(\"sSwing\")\n break;\n case \"Clutch:\":\n msg.payload=global.get(\"sClutch\")\n break;\n case \"Neck:\":\n msg.payload=global.get(\"sNeck\")\n break;\n case \"Elbow:\":\n msg.payload=global.get(\"sElbow\");\n}\nreturn msg;","outputs":1,"noerr":0,"x":110,"y":160,"wires":[["7acd57d2.038a98"]]},{"id":"2f5a32c1.11327e","type":"switch","z":"d23d43db.8dc31","name":"","property":"servo","propertyType":"global","rules":[{"t":"eq","v":"Rotate:","vt":"str"},{"t":"eq","v":"Lift:","vt":"str"},{"t":"eq","v":"Swing:","vt":"str"},{"t":"eq","v":"Clutch:","vt":"str"},{"t":"eq","v":"Neck:","vt":"str"},{"t":"eq","v":"Elbow:","vt":"str"}],"checkall":"false","repair":false,"outputs":6,"x":110,"y":400,"wires":[["68577bb3.83cd94"],["18dd4dd0.b60d72"],["976d3c9d.24d85"],["93d49e18.b2d32"],["872acfef.ba58d"],["a134316b.f3a15"]]},{"id":"eda51933.3fac18","type":"ui_template","z":"d23d43db.8dc31","group":"d5554539.2e0268","name":"","order":1,"width":6,"height":6,"format":"<!--h3><font style=\"color:#0eb8c0;\">Arti Ebony</font></h3-->\n<div>This <em>articulated</em> arm demonstrates the working in three modes</div><br>\n<b style=\"color:#0eb8c0;\">Manual</b>\n<div>Each of six servos can be adjusted to desired position</div><br>\n<b style=\"color:#0eb8c0;\">Sensor Slaved</b>\n<div>The arm follows the orientation sensor and is automated</div><br>\n<b style=\"color:#0eb8c0;\">Color Picker</b>\n<div>The arm picks the object based on color selected and is automated</div>","storeOutMessages":true,"fwdInMessages":true,"templateScope":"local","x":700,"y":240,"wires":[[]]},{"id":"cbabd0a8.0e0fc","type":"change","z":"d23d43db.8dc31","name":"","rules":[{"t":"set","p":"payload","pt":"msg","to":"{\"group\":{\"hide\":[\"Arti_Ebony_Android_Servos\",\"Arti_Ebony_Android_Slider\",\"Arti_Ebony_Android_Color\"],\"show\":[\"Arti_Ebony_Android_startup\",\"Arti_Ebony_Android_Main_Controls\"]}}","tot":"json"}],"action":"","property":"","from":"","to":"","reg":false,"x":660,"y":80,"wires":[["f2fdaaf3.7463f8"]]},{"id":"fb33b913.178188","type":"change","z":"d23d43db.8dc31","name":"","rules":[{"t":"set","p":"ui_control","pt":"msg","to":"{\"options\":{\"reverse\":true}}","tot":"json"},{"t":"change","p":"payload","pt":"msg","from":"true","fromt":"bool","to":"ui_control","tot":"msg"}],"action":"","property":"","from":"","to":"","reg":false,"x":220,"y":560,"wires":[[]]},{"id":"a0929dd8.2788f","type":"function","z":"d23d43db.8dc31","name":"UI controls","func":"\nvar ui_c1={\"ui_control\":{\"options\":{\"gaugeWidthScale\":0.7,\"minTxt\":\"Lt\",\"maxTxt\":\"Rt\"}}};\nvar ui_c2={\"ui_control\":{\"options\":{\"gaugeWidthScale\":0.7,\"minTxt\":\"Dn\",\"maxTxt\":\"Up\"}}};\nvar ui_c3={\"ui_control\":{\"options\":{\"gaugeWidthScale\":0.7,\"minTxt\":\"C\",\"maxTxt\":\"O\"}}};\n\nreturn [[msg,ui_c1],[msg,ui_c2],[msg,ui_c1],[msg,ui_c3],[msg,ui_c2],[msg,ui_c2]];","outputs":6,"noerr":0,"x":370,"y":160,"wires":[["68577bb3.83cd94"],["18dd4dd0.b60d72"],["976d3c9d.24d85"],["93d49e18.b2d32"],["872acfef.ba58d"],["a134316b.f3a15"]]},{"id":"4d76b58d.ed6f2c","type":"function","z":"d23d43db.8dc31","name":"Slider Clamp","func":"switch(global.get(\"servo\")){\n case \"Rotate:\":\n global.set(\"sRotate\",msg.payload)\n break\n case \"Lift:\":\n global.set(\"sLift\",msg.payload)\n break\n case \"Swing:\":\n global.set(\"sSwing\",msg.payload)\n break\n case \"Clutch:\":\n global.set(\"sClutch\",msg.payload)\n break\n case \"Neck:\":\n global.set(\"sNeck\",msg.payload)\n break\n case \"Elbow:\":\n global.set(\"sElbow\",msg.payload)\n}\nreturn msg;","outputs":1,"noerr":0,"x":110,"y":260,"wires":[["2f5a32c1.11327e"]]},{"id":"40f8feb6.adda","type":"change","z":"d23d43db.8dc31","name":"","rules":[{"t":"set","p":"servo","pt":"global","to":"Rotate:","tot":"str"},{"t":"set","p":"sRotate","pt":"global","to":"0","tot":"num"},{"t":"set","p":"sLift","pt":"global","to":"0","tot":"num"},{"t":"set","p":"sClutch","pt":"global","to":"0","tot":"num"},{"t":"set","p":"sNeck","pt":"global","to":"0","tot":"num"},{"t":"set","p":"sElbow","pt":"global","to":"0","tot":"num"},{"t":"set","p":"payload","pt":"msg","to":"Rotate:","tot":"str"}],"action":"","property":"","from":"","to":"","reg":false,"x":120,"y":60,"wires":[["9f956354.d280e"]]},{"id":"2f1af37b.23b72c","type":"range","z":"d23d43db.8dc31","minin":"0","maxin":"180","minout":"180","maxout":"0","action":"clamp","round":true,"property":"payload","name":"","x":270,"y":640,"wires":[[]]},{"id":"2ba382f5.480bce","type":"ui_group","z":"","name":"Servos","tab":"ff7f7fd1.305d8","order":2,"disp":false,"width":"6","collapse":false},{"id":"460ae6cb.692b28","type":"ui_group","z":"","name":"Main Controls","tab":"ff7f7fd1.305d8","order":3,"disp":false,"width":"5","collapse":false},{"id":"8feee98.7f9b318","type":"ui_group","z":"","name":"Slider","tab":"ff7f7fd1.305d8","order":4,"disp":false,"width":"5","collapse":false},{"id":"51e27c79.447a84","type":"ui_group","z":"","name":"Color","tab":"ff7f7fd1.305d8","order":5,"disp":false,"width":"5","collapse":false},{"id":"d5554539.2e0268","type":"ui_group","z":"","name":"startup","tab":"ff7f7fd1.305d8","order":1,"disp":false,"width":"6","collapse":false},{"id":"ff7f7fd1.305d8","type":"ui_tab","z":"","name":"Arti Ebony Android","icon":"dashboard","order":3,"disabled":false,"hidden":false}]