Just had a very quick go at creating a simple flow. (I'm sure it can be simplified.)
I've used 'green' for OFF and 'red' for ON. Some people prefer the colours the other way round.
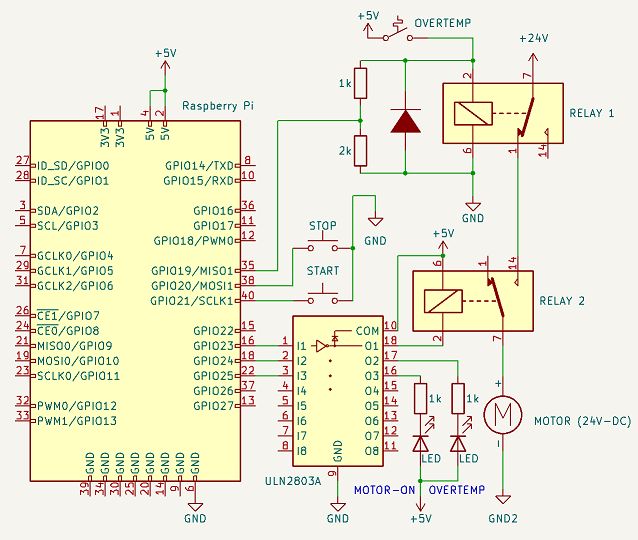
I've also set the input pins with pull-ups, so the inputs are active LOW (pin shorted to ground).
According to your diagram, the relay is operated when the output pin is LOW.
[{"id":"dcbdc7f59c771cef","type":"rpi-gpio in","z":"061e6706bc551e8f","name":"Start_button","pin":"21","intype":"up","debounce":"25","read":false,"bcm":true,"x":170,"y":360,"wires":[["6e2a412933384981"]]},{"id":"4593b98cd7e79233","type":"rpi-gpio in","z":"061e6706bc551e8f","name":"Stop button","pin":"20","intype":"up","debounce":"25","read":false,"bcm":true,"x":170,"y":260,"wires":[["eeccab846ba426c0"]]},{"id":"838f715684cd618a","type":"rpi-gpio out","z":"061e6706bc551e8f","name":"Motor_relay","pin":"23","set":"","level":"0","freq":"","out":"out","bcm":true,"x":790,"y":240,"wires":[]},{"id":"51dc944c0dab2799","type":"comment","z":"061e6706bc551e8f","name":"Assuming buttons are Active LOW","info":"","x":240,"y":100,"wires":[]},{"id":"be04b5291db74554","type":"inject","z":"061e6706bc551e8f","name":"","props":[{"p":"payload"}],"repeat":"","crontab":"","once":true,"onceDelay":0.1,"topic":"","payload":"1","payloadType":"num","x":170,"y":160,"wires":[["6a27ec01cc850822"]]},{"id":"6a27ec01cc850822","type":"change","z":"061e6706bc551e8f","name":"","rules":[{"t":"set","p":"motor_relay","pt":"flow","to":"OFF","tot":"str"}],"action":"","property":"","from":"","to":"","reg":false,"x":400,"y":160,"wires":[["7b4b5ef2c80cdb62"]]},{"id":"eeccab846ba426c0","type":"change","z":"061e6706bc551e8f","name":"","rules":[{"t":"set","p":"motor_relay","pt":"flow","to":"OFF","tot":"str"}],"action":"","property":"","from":"","to":"","reg":false,"x":400,"y":240,"wires":[["7b4b5ef2c80cdb62"]]},{"id":"6e2a412933384981","type":"change","z":"061e6706bc551e8f","name":"","rules":[{"t":"set","p":"motor_relay","pt":"flow","to":"ON","tot":"str"}],"action":"","property":"","from":"","to":"","reg":false,"x":400,"y":340,"wires":[["7b4b5ef2c80cdb62"]]},{"id":"7b4b5ef2c80cdb62","type":"function","z":"061e6706bc551e8f","name":"","func":"let relay = flow.get(\"motor_relay\") || \"OFF\";\n\nif (relay == \"OFF\") {\n node.status({fill:\"green\",shape:\"dot\",text:\"Relay is OFF\"});\n msg.payload = 1;\n return msg;\n}\nelse if (relay == \"ON\") {\n node.status({fill:\"red\",shape:\"dot\",text:\"Relay is ON\"});\n msg.payload = 0;\n return msg;\n}\n\nreturn null;","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":620,"y":240,"wires":[["838f715684cd618a"]]},{"id":"1fa7b0c1ebe3d5be","type":"inject","z":"061e6706bc551e8f","name":"Test Stop btn","props":[{"p":"payload"}],"repeat":"","crontab":"","once":false,"onceDelay":0.1,"topic":"","payload":"1","payloadType":"num","x":190,"y":220,"wires":[["eeccab846ba426c0"]]},{"id":"db91334e3e60c1ab","type":"inject","z":"061e6706bc551e8f","name":"Test Start btn","props":[{"p":"payload"}],"repeat":"","crontab":"","once":false,"onceDelay":0.1,"topic":"","payload":"1","payloadType":"num","x":190,"y":320,"wires":[["6e2a412933384981"]]},{"id":"f78b40a92aa3d54d","type":"comment","z":"061e6706bc551e8f","name":"Assuming relay is activated with a LOW","info":"","x":870,"y":200,"wires":[]}]


")
