I have connected an Alley Bradley PowerFlex 525 variable frequency drive to a Pi using RS485 (DSI) protocol. I can instantly get the "easy" parameters, such as:
output frequency (address: 001):

result (~58.2 Hz)

I can do the above for pretty much all the other parameters.
However, in this application, we command the motor to rotate forward and reverse for periods of time. This looks to be available (p. 193 of the manual):

(I confirmed that C122 is set to velocity)

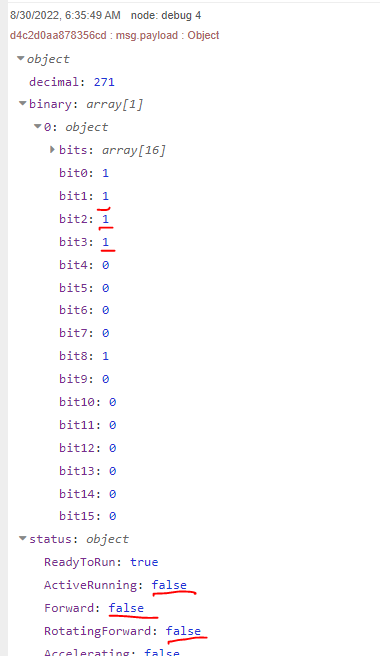
Per the above paragraph about Reading (03) Logic Status Data, since 2100 hex = 8448 decimal, I put address 8448 into the Flex Getter Modbus node and get this:

Can someone explain what I am looking at (specifically the 271 and the 1 & 15 in the buffer), and how it ties (or does not tie) with the grid / table above explaining each of the 16 logic bits? I am 90% certain this will be resolved via the Buffer-Parser node, but I would like to understand better what I am looking at before passing the contents to the B-P node.
I am attaching the flow here, although it's quite simple at this point.
[{"id":"e9a3977f5e0d61e4","type":"inject","z":"099a91da4f256498","name":"","props":[{"p":"payload"},{"p":"topic","vt":"str"}],"repeat":"10","crontab":"","once":false,"onceDelay":0.1,"topic":"","payload":"","payloadType":"date","x":770,"y":660,"wires":[["72fd6247261cfe08"]]},{"id":"72fd6247261cfe08","type":"function","z":"099a91da4f256498","name":"function 1","func":"msg.payload = {\n value: msg.payload,\n 'fc': 3,\n 'unitid': 1,\n 'address': 8448,\n 'quantity': 1\n}\n\nreturn msg","outputs":1,"noerr":0,"initialize":"","finalize":"","libs":[],"x":860,"y":720,"wires":[["d4c2d0aa878356cd"]]},{"id":"d4c2d0aa878356cd","type":"modbus-flex-getter","z":"099a91da4f256498","name":"","showStatusActivities":false,"showErrors":true,"logIOActivities":false,"server":"a536fdaba00fed1f","useIOFile":false,"ioFile":"","useIOForPayload":false,"emptyMsgOnFail":false,"keepMsgProperties":false,"x":990,"y":780,"wires":[["48ce98bc53ee3ebc"],[]]},{"id":"48ce98bc53ee3ebc","type":"debug","z":"099a91da4f256498","name":"debug 2","active":false,"tosidebar":true,"console":false,"tostatus":false,"complete":"true","targetType":"full","statusVal":"","statusType":"auto","x":1100,"y":900,"wires":[]},{"id":"a536fdaba00fed1f","type":"modbus-client","name":"","clienttype":"serial","bufferCommands":true,"stateLogEnabled":false,"queueLogEnabled":false,"failureLogEnabled":true,"tcpHost":"127.0.0.1","tcpPort":"502","tcpType":"DEFAULT","serialPort":"/dev/ttyUSB0","serialType":"RTU","serialBaudrate":"9600","serialDatabits":"8","serialStopbits":"1","serialParity":"even","serialConnectionDelay":"1000","serialAsciiResponseStartDelimiter":"0x3A","unit_id":"","commandDelay":2000,"clientTimeout":10000,"reconnectOnTimeout":true,"reconnectTimeout":5000,"parallelUnitIdsAllowed":false}]
EDIT: After ~15 minutes, I noticed a few error messages and a change in the output from 271 to 303. Still not making any sense to me, though.